

POLOLU-5342
$24,990
| Cantidad | Precio |
|---|---|
| 3+ | $24,490 |
| 5+ | $24,240 |
| 10+ | $23,741 |
| 25+ | $23,241 |
| 50+ | $22,491 |
Controlador de motor paso a paso A5984, corriente ajustable.
8 disponibles
Controlador de motor paso a paso bipolar de microstepping A5984 de Allegro.
Ofrece ocho resoluciones de microstep diferentes (hasta 1/32 de paso) y cuenta con protección contra sobrecorriente y sobrecalentamiento. Además, incorpora un algoritmo de decaimiento adaptativo que optimiza automáticamente la forma de onda de la corriente del motor. Esta versión tiene un límite de corriente ajustable que se puede configurar mediante un potenciómetro a bordo, y puede entregar hasta aproximadamente 1 A continuo por fase sin necesidad de disipador de calor o ventilación forzada (2 A pico).
Características
- Rango de voltaje de alimentación: 8 V a 40 V (Nota: no se recomienda su uso con baterías de 36 V, ya que pueden superar su voltaje nominal cuando están completamente cargadas).
- Versiones disponibles con límite de corriente ajustable y límite de corriente fijo.
- Interfaz de control simple con señales de paso (step) y dirección (direction).
- Ocho resoluciones de paso diferentes:
- Paso completo con 100% de corriente.
- Paso completo modificado (71% de corriente).
- Medio paso con 100% de corriente.
- Medio paso modificado (circular).
- 1/4 de paso, 1/8 de paso, 1/16 de paso, 1/32 de paso.
- Las opciones de límite de corriente ajustable y fijo permiten seleccionar una salida de corriente máxima adecuada, lo que te permite utilizar voltajes superiores al valor nominal de tu motor paso a paso para lograr mayores tasas de pasos.
- Algoritmo de control de corriente adaptativa (APFD), también conocido como QuietStep, que ajusta automáticamente la cantidad de decaimiento rápido para optimizar la forma de onda de la corriente del motor.
- Protección contra sobrecalentamiento, sobrecorriente, y bloqueo por subtensión.
- PCB de 2 onzas de cobre para mejorar la disipación de calor; disponible en opciones de 2 capas (PCB verde) y 4 capas (PCB azul).
- Almohadilla de tierra soldable expuesta debajo del controlador en la parte inferior de la PCB.
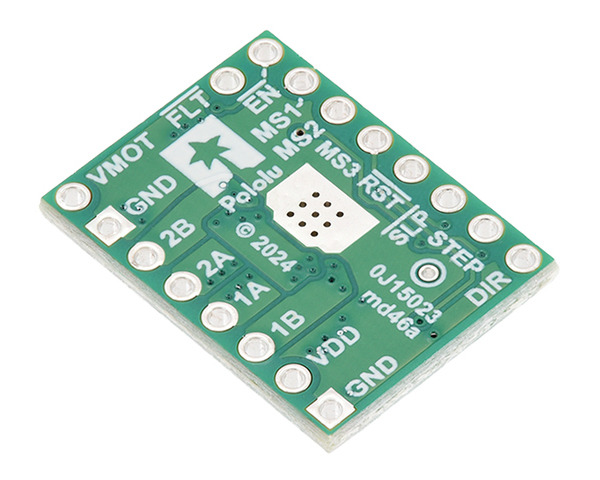
- El tamaño del módulo, el pinout y la interfaz coinciden en su mayoría con los portadores de controladores de motor paso a paso A4988.
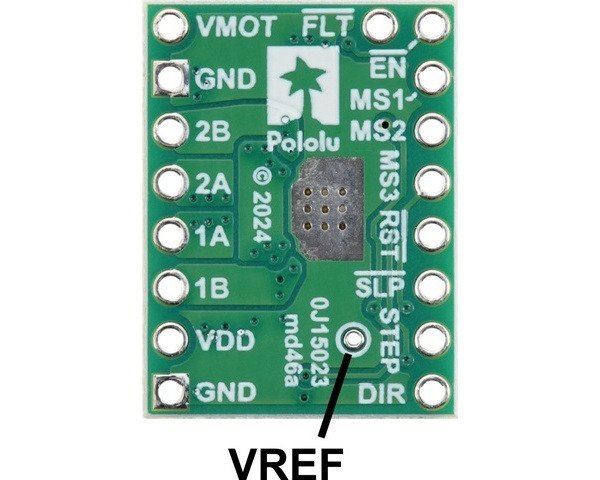
Este producto es la versión con corriente ajustable del A5984, que cuenta con un potenciómetro para establecer el límite de corriente y puede suministrar hasta aproximadamente 1 A continuo por fase sin un disipador de calor ni flujo de aire forzado (2 A pico). Esta versión no incluye ni tiene pines de cabecera soldados; los pines de cabecera de 0.1″ están disponibles por separado.
Usando el controlador
Conexiones de alimentación
El controlador requiere un voltaje de alimentación para el motor de 8 V a 40 V (máximo absoluto) que debe conectarse entre VMOT y GND. Esta fuente de alimentación debe ser capaz de suministrar la corriente esperada por el motor paso a paso.
Conexiones del motor
El A5984 puede controlar motores paso a paso de cuatro, seis y ocho cables si están correctamente conectados; una respuesta en la sección de preguntas frecuentes (FAQ) explica en detalle los cableados correctos [AQUÍ].
Advertencia: Conectar o desconectar un motor paso a paso mientras el controlador está alimentado puede dañar el controlador. (En general, hacer modificaciones en el cableado mientras está alimentado puede causar problemas.)
Step (and microstep) size
Los motores paso a paso típicamente tienen una especificación de tamaño de paso (por ejemplo, 1.8° o 200 pasos por revolución), que se aplica a los pasos completos. Un controlador de microstepping como el A5984 permite resoluciones más altas al permitir posiciones de paso intermedias, logradas energizando las bobinas con niveles de corriente intermedios. Por ejemplo, al manejar un motor en modo de cuarto de paso, un motor de 200 pasos por revolución obtendrá 800 microsteps por revolución al usar cuatro niveles de corriente diferentes.
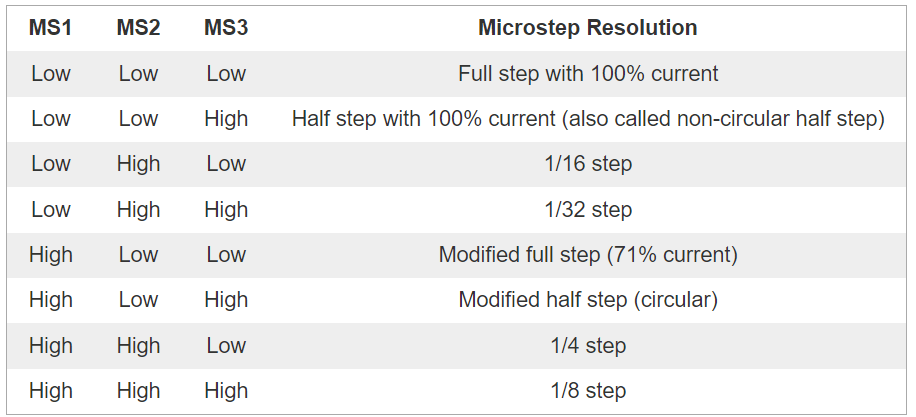
Las entradas del selector de resolución (tamaño de paso) MS1, MS2 y MS3 permiten seleccionar entre las ocho resoluciones de paso según la tabla a continuación. El controlador por defecto está en modo de paso completo con 100% de corriente. Para que los modos de microstep funcionen correctamente, el límite de corriente debe configurarse lo suficientemente bajo (ver más abajo) para que se active la limitación de corriente. De lo contrario, los niveles de corriente intermedios no se mantendrán correctamente y el motor se saltará los microsteps.
Control inputs and status outputs
El flanco ascendente de cada pulso a la entrada STEP corresponde a un micropaso del motor paso a paso en la dirección seleccionada por el pin DIR. Ten en cuenta que los pines STEP y DIR no están conectados internamente a ningún voltaje específico, por lo que no debes dejar ninguno de estos pines flotando en tu aplicación. Si solo deseas rotación en una sola dirección, puedes conectar DIR directamente a VDD o GND.
El chip tiene tres entradas diferentes para controlar sus estados de energía: RESET , SLEEP y ENABLE . El pin RESET ( RST ) es flotante por defecto; este pin debe estar alto para habilitar el controlador (puede estar conectado al pin SLEEP adyacente o directamente a un voltaje lógico “alto” entre 2 V y 5,5 V, o puede controlarse dinámicamente desde una salida digital de un MCU). El estado predeterminado de los pines SLEEP ( SLP ) y ENABLE ( EN ) es habilitar el controlador (la placa base eleva SLEEP a VDD y baja ENABLE a GND). Consulte la hoja de datos para obtener más detalles.
El A5984 también cuenta con una salida FAULT (nFAULT) de drenaje abierto que se activa cuando el controlador detecta una falla por sobrecorriente. La placa base eleva este pin a VDD, por lo que no es necesario un pull-up externo en el pin FAULT . Si se baja RESET o SLEEP, se elimina una falla bloqueada.
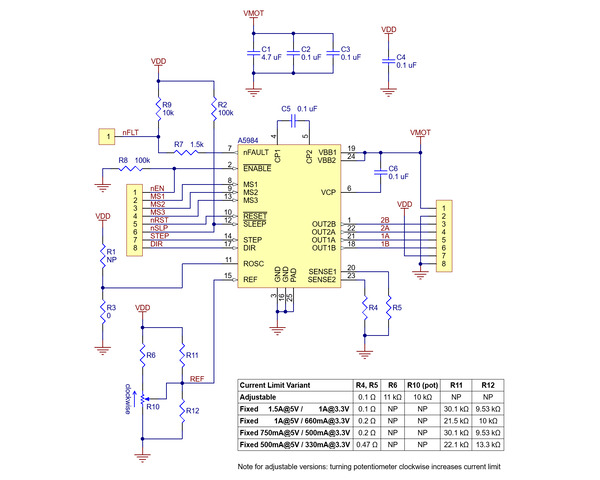
Current limiting. [AQUÍ].
Sitio Web del Fabricante: Pololu






Valoraciones
No hay valoraciones aún.