POLOLU-2993
$309,995
| Cantidad | Precio |
|---|---|
| 3+ | $303,795 |
| 5+ | $300,695 |
| 10+ | $294,495 |
| 25+ | $288,295 |
| 50+ | $278,996 |
Pololu H2 High-Power Motor Driver 36v11 CS.
5 disponibles
Pololu H2 High-Power Motor Driver 36v11 CS.
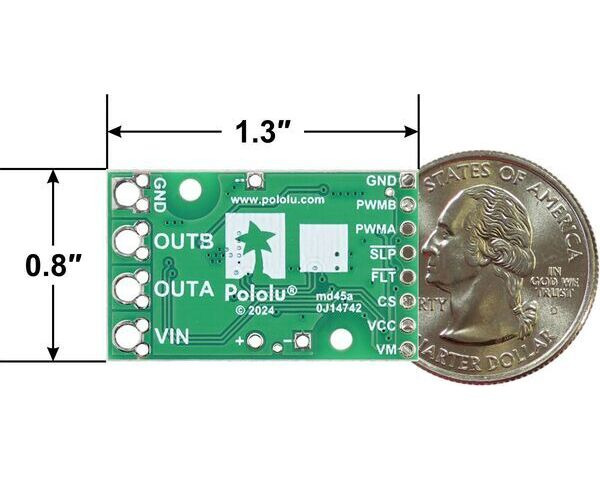
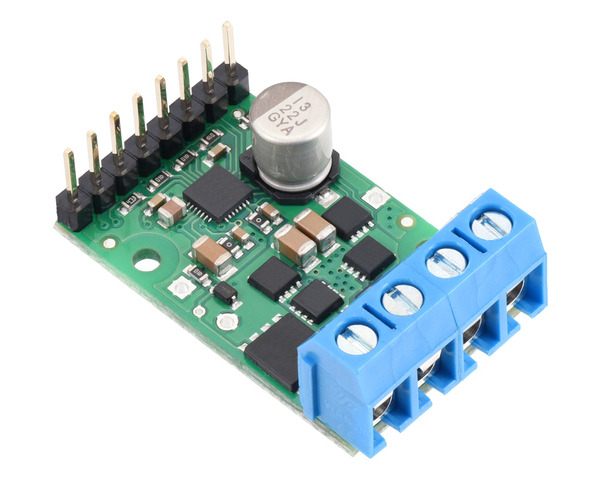
El Pololu H2 High-Power Motor Driver 36v11 CS es un controlador de motor en puente H, basado en MOSFET, altamente eficiente, diseñado para el control bidireccional de un motor DC de alto rendimiento. Con su tamaño compacto de 1.3″ × 0.8″, admite un amplio rango de voltaje de operación entre 5 V y 60 V, y puede entregar hasta 11 A de corriente continua sin la necesidad de un disipador de calor. Este controlador incluye varias características avanzadas, como protección contra inversión de voltaje y un sensor de corriente integrado para monitoreo preciso, lo que lo convierte en una opción ideal para aplicaciones que requieren control de motores de alta demanda.
Características:
- Rango de voltaje de operación: 5 V a 60 V (máximo absoluto de 60 V).
- Corriente de salida continua máxima: 11 A (sin necesidad de disipador de calor).
- Compatibilidad de entradas: Funciona con sistemas lógicos de 3.3 V y 5 V, lo que lo hace flexible para usar con muchos microcontroladores.
- Sensor de corriente integrado: Mide directamente la corriente del motor, permitiendo un monitoreo preciso para protección y retroalimentación.
- Características de protección:
- Protección contra inversión de voltaje: Previene daños por conexiones incorrectas de la fuente de alimentación.
- Apagado por bajo voltaje: Protege el controlador de condiciones de bajo voltaje.
- Protección contra cortocircuitos: Protege el controlador de cortocircuitos en el motor o en el circuito.
- Compatibilidad con frecuencias PWM: Funciona con frecuencias típicas de modulación por ancho de pulso (PWM) para control de velocidad.
- Tamaño: 1.3″ × 0.8″, ofreciendo alta capacidad de potencia en un formato pequeño.
Recomendaciones de seguridad y voltaje:
- Voltaje máximo: El controlador puede manejar hasta 60 V; sin embargo, debido a picos de voltaje o estados de carga de baterías, el voltaje seguro máximo recomendado es de 48 V. Si el controlador opera cerca de su límite de voltaje, se recomienda añadir una protección adecuada para evitar daños.
Uso del controlador de motor:
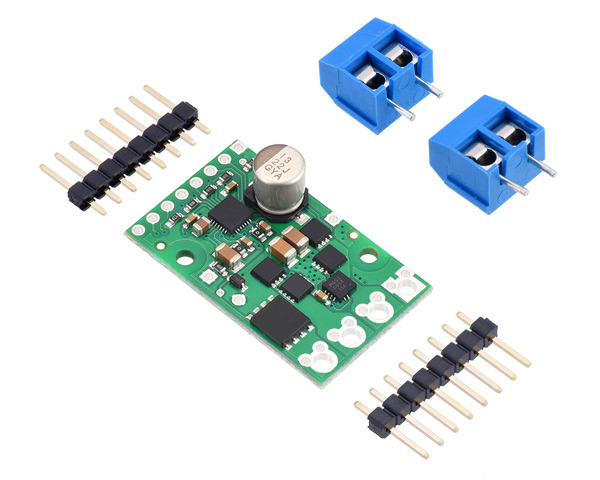
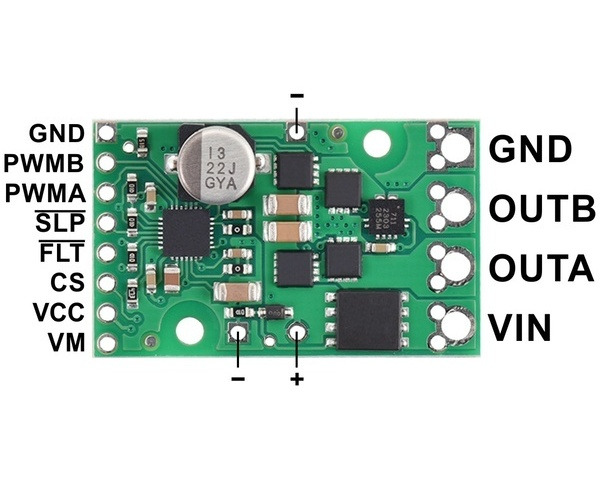
- Conexiones:
- Las conexiones de motor y alimentación de motor están en un lado de la placa, mientras que las conexiones de control (lógica de 3 V a 5 V) están en el otro lado. Se recomienda una fuente de alimentación capaz de suministrar alta corriente. Existen dos opciones para hacer las conexiones de alta potencia (VIN, OUTA, OUTB, GND): agujeros grandes espaciados 5 mm, compatibles con bloques de terminales incluidos, y pares de agujeros con espaciado de 0.1″, que se pueden usar con protoboards, placas de prueba, y conectores de 0.1″.
Es importante instalar un condensador grande entre la fuente de alimentación del motor y la tierra cerca del controlador para un buen rendimiento. Se recomienda un condensador de al menos unos cuantos cientos de μF con un voltaje nominal superior al máximo de la fuente de alimentación.
«Las conexiones lógicas están diseñadas para interactuar con sistemas de 3 V a 5 V (5,5 V máx.)»

Frecuencia PWM
El controlador del motor admite frecuencias PWM de hasta 100 kHz, pero tenga en cuenta que las pérdidas de conmutación en el controlador serán proporcionales a la frecuencia PWM. Por lo general, alrededor de 20 kHz es una buena opción, ya que es lo suficientemente alta como para ser ultrasónica, lo que da como resultado un funcionamiento más silencioso.
Un pulso alto en el pin PWM debe ser alto durante una duración mínima de aproximadamente 0,25 µs antes de que las salidas se activen durante la duración correspondiente (cualquier pulso de entrada más corto no produce un cambio en las salidas), por lo que los ciclos de trabajo bajos no están disponibles en frecuencias altas. Por ejemplo, a 100 kHz, el período del pulso es de 10 µs y el ciclo de trabajo mínimo distinto de cero que se puede lograr es 0,25/10, o 2,5 %.
Tiempo mínimo de inactividad
Si bien el controlador admite un funcionamiento con un ciclo de trabajo del 100 %,Cualquier pulso bajo en las entradas PWM debe tener una duración de al menos 0,3 µs para evitar una activación espuria y bloqueada de la falla de cortocircuito.Esto corresponde a ciclos de trabajo inferiores al 99,4 % a 20 kHz o inferiores al 97 % a 100 kHz. Para evitar estos fallos espurios, recomendamos limitar los ciclos de trabajo proporcionados a las entradas del controlador al ciclo de trabajo máximo o saltar del máximo directamente al 100 % (por ejemplo, a 20 kHz, no superar el 99 %, o saltar del 99 % al 100 % si es preferible el funcionamiento al 100 % al 99 %).
Advertencia: tome precauciones de seguridad al utilizar componentes electrónicos de alta potencia. Asegúrese de saber lo que está haciendo cuando trabaje con altos voltajes o corrientes. Durante el funcionamiento normal, este producto puede calentarse lo suficiente como para quemarlo. Maneje este producto y los componentes conectados a él con cuidado.
Sitio Web del Fabricante: Pololu



Valoraciones
No hay valoraciones aún.